
RF-17 Sensor Hub Modules
Summary
The RF-17 Sensor Modules were the first custom data acquisition modules to be developed on the Ryerson Formula Racing team. The driving force behind the creation of the modules was: to expand the total IO capabilities of the car (restricted by the ECU), reduce wiring harness complexity and mass, and simplify the addition of various automotive sensors.
Expand
The ECU used by RFR was the Megasquirt 3 Pro, which is a reasonably priced and capable that supports Electronic Fuel Injection. However, the ECU has a limited number of analog inputs. Most of the inputs are taken up by critical sensors (such as fuel and oil pressure), leaving virtually none for the vast sensor configurations that are useful during the development and validation of the vehicle. The ECU does have a CAN bus interface though, which supports many more sensors to be logged and used by the ECU. Therefore, having CAN-connected modules that interface with the sensors remotely greatly increases the DAQ capabilities of the vehicle.
Reduce
Assuming the ECU could support all of the needed sensors directly, each sensor requires a direct electrical connection to the ECU and/or the power distribution module. Increasing the sensor count therefore has the overhead of more wiring running all the way back to the ECU. The harness was also split into front and rear sections at the firewall for modularity and strain-relief purposes, so adding more sensors to the front section would required a high contact-count connector for the firewall interface.
CAN bus, on the other hand, requires a single differential pair for signaling, as well as two wires for power. It is much easier and more cost effective to run these four wires to 4-5 modules than to run 2-4 wires per sensor.
Simplify
As mentioned before, the ECU supports analog and digital I/O. More advanced sensor interfaces, such as UART or I2C, cannot be integrated natively. Many of the sensors implemented on the car (e.g. IMU, infrared temperature sensors, etc.) only support a higher-level digital interface. Some sort of module would be required either way in order to use those sensors on the vehicle.
Having a generic module that could be dropped in anywhere on the car, with minimal wiring, greatly simplifies the process of adding any arbitrary sensor, as opposed to making a custom module per sensor.
Features
The boards use a dsPIC33EV family microcontroller, programmed in bare-metal C. The boards feature:
- 5 dedicated analog inputs
- I2C breakout with optional buffer
- CAN bus interface
- Breakout of all unused MCU pins
- CAN termination switch
- BOM variant between central module with IMU and wheel module with IR brake temperature sensors
Gallery
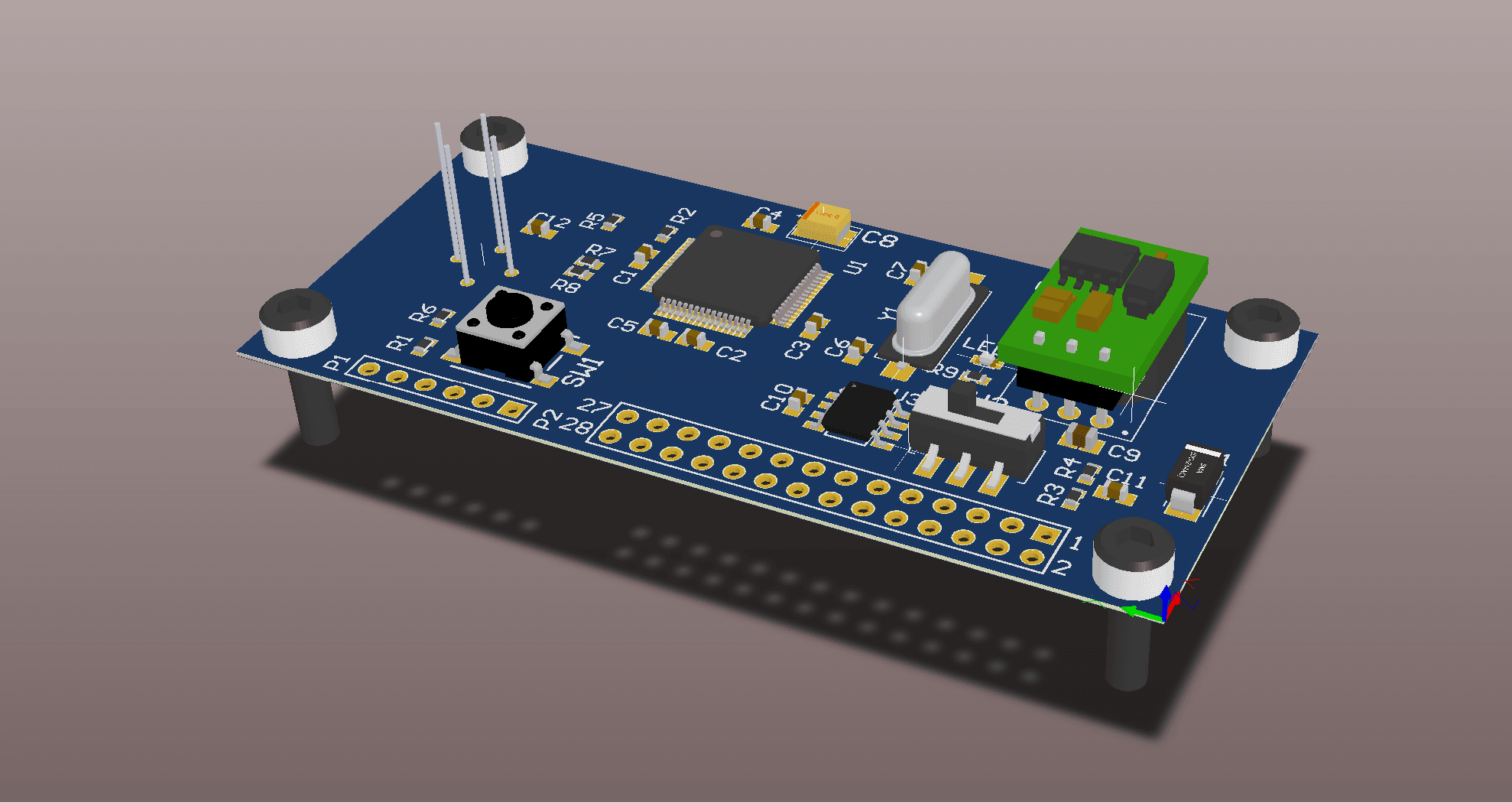
3D render

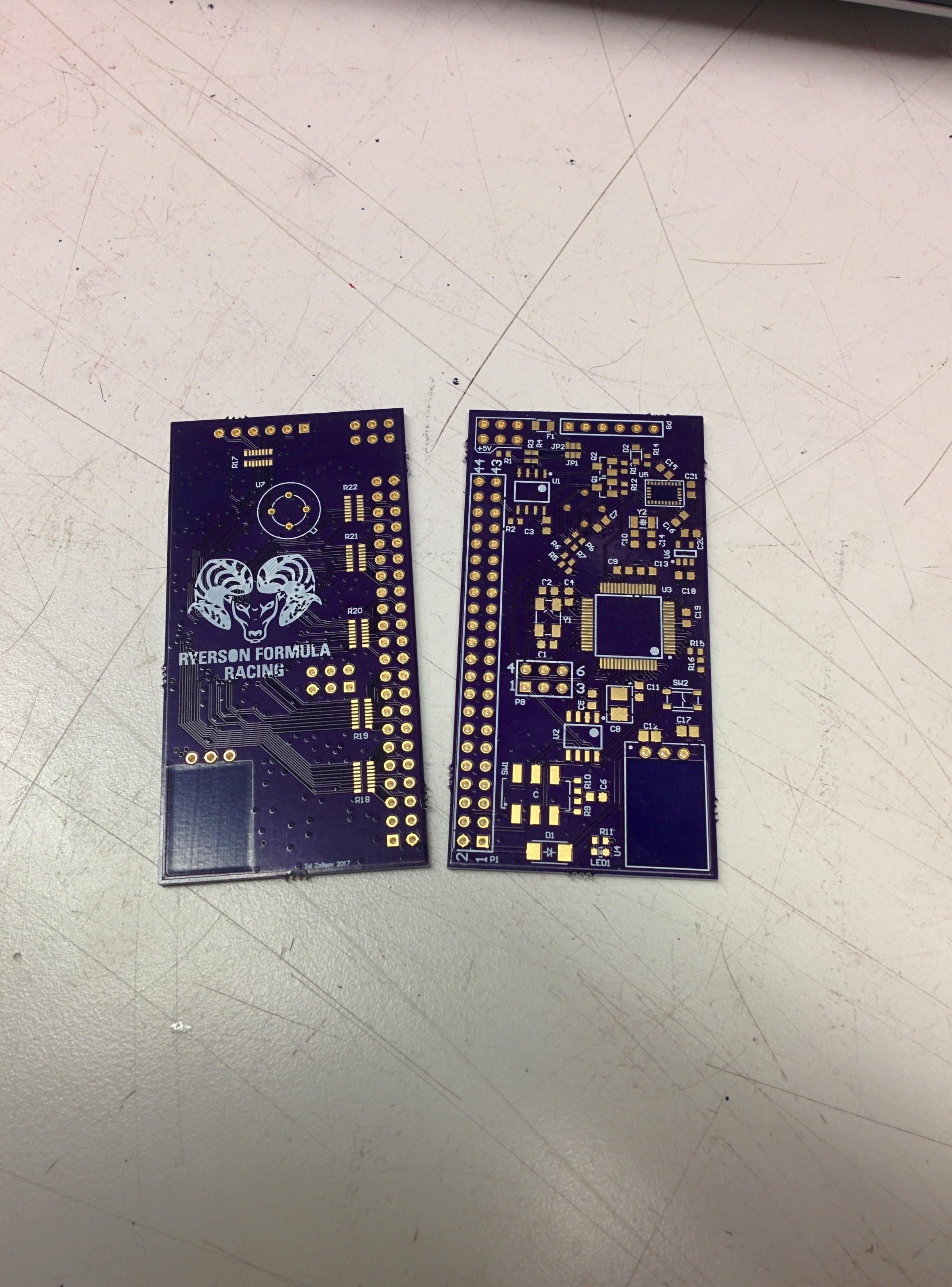
Boards from OSHPark
PCB closeup
Bringup
Finished modules